




倉林研究室では、知的な振る舞いを可能とするロボットシステムについて、その実現手法(制御アルゴリズム・ハードウェア・システム化)に関する研究を行っています。

1980年代以来、コンピュータの一般化に伴って、「知的な振る舞いをする機械」としてのロボット研究が数多く行われてきました。どのような振る舞いが「知的」なのかについては、時代の経過につれて変化してきていますが、現在注目すべき知的な振る舞いとは、「事前に全ての知識を与えなくても目的を達成できる」言い換えれば「目標状態の与え方の抽象度が高い」システムの実現と言えるのではないでしょうか。
このような知的システムの実現に当たっては、主に2通りのアプローチが存在するといえます。1つは、個体として知的なシステム、ずばり「人間的な賢さ」を実現しようとするアプローチです。このアプローチは、古典的には人工推論システム、現代的には脳科学研究によって推し進められていますが、身体を持ち外界に作用するというロボットシステムとしての実装にはまだ多くの課題を残しています。
一方、もう1つのアプローチとして「集団で(単体と比べて)高度な機能を実現する」というシステムのアプローチがあります。たとえばアリは、1匹ではとても小さく、作業できる範囲も限られていますが、集団として統率のとれた行動を行うことによって、自分の体よりはるかに大きな物体を加工したり、効率よく餌を探したりすることが可能となっています。
前者と後者では「賢さ」と考える対象が依然として異なっていますが、未知な環境に適応して作業ができる(人間がロボットに対して正確なモデルを用意してあげなくてもよい)という実用的な意味では、後者のアプローチが実現に近そうです。
また、「賢い個体」も、何か単一の「賢い要素」から出来ているわけではなく、神経回路網に代表される情報処理ネットワークや身体・環境・集団との関係性において、頑健かつ適応的な活動を可能とするシステムがボトムアップ的に成立していると考えられます。
本研究室ではこのような考えに立ち、以下のような「群れとして賢く行動するロボット」「賢さを実現するシステム原理」の解明を中心課題として研究を進めています。
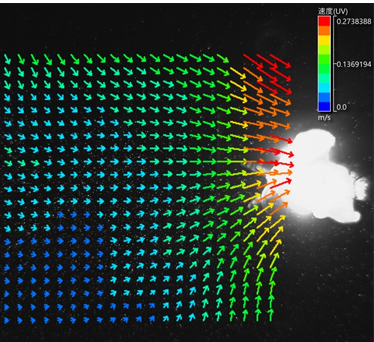
カイコガという昆虫は成虫になると、性フェロモンを手掛かりに雄が雌を探し定位する、という行動のみを行います。この「匂いの源を探す」という行動は、危険な物質の検出・火事の発見・ガス漏れ検知など、工学的な応用が期待できます。カイコガは飛べないのですが、探索行動中は翅を羽ばたかせることで、周囲の匂いを適切にセンサである触角へ導き、定位能力を大幅に向上させると言われています。この身体が持つ機能を、PIV(Particle Image Velocimetry)計測やロボットでの吸気機能実験により解析し、効率的な人工嗅覚系の構築に取り組んでいます。
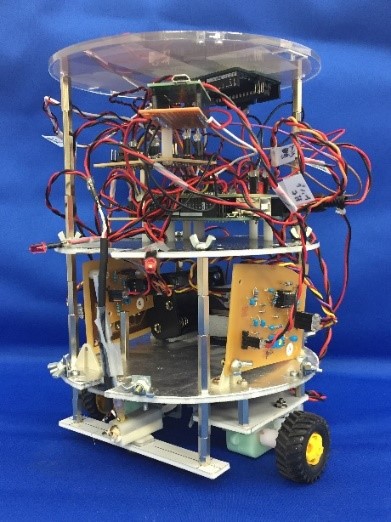
空気中の化学物質を辿り、匂い源にたどり着く、という行動は、空気挙動の複雑さや化学物質拡散の複雑さから自律ロボットにとって困難な作業とされています。一方で、生物は一般的にこの能力を持っており、採餌や繁殖などに活用しています。本研究は人間と関わりの深いカイコガ雄成虫の行動をモデルとし、センサである触角の同定やそのもののセンサとしての利用、行動アルゴリズムの解析・同定とロボットへの再構成、身体機能の解析とロボット設計への応用などを通じて、生物の持つ機能性を工学的に応用する研究を進めています。具体的には、地上走行型匂い源探査ロボットや空中移動型匂い源探索ロボット、およびカイコガ生体をセンサ・コントローラとするロボット実験系の構築などによって高効率の匂い源探索ロボットの実現を目指します。
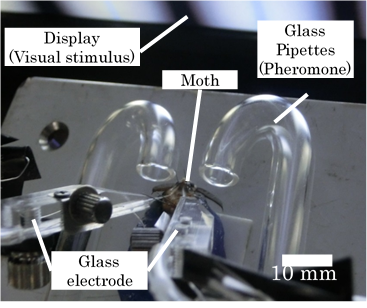
視界を塞がれたカイコガ雄は、雌への定位成功率が下がることがわかっています。匂い源探索には嗅覚(匂いセンサ)情報だけでなく、視覚(カメラ)情報も関係しています。カイコガが匂い源探索中に視覚情報をどのように利用しているのか調べるため、神経生理学的なアプローチを行っています。顕微鏡下でカイコガを解剖し神経信号をガラス電極で計測することで、脳から身体への行動指令を直接調べています。
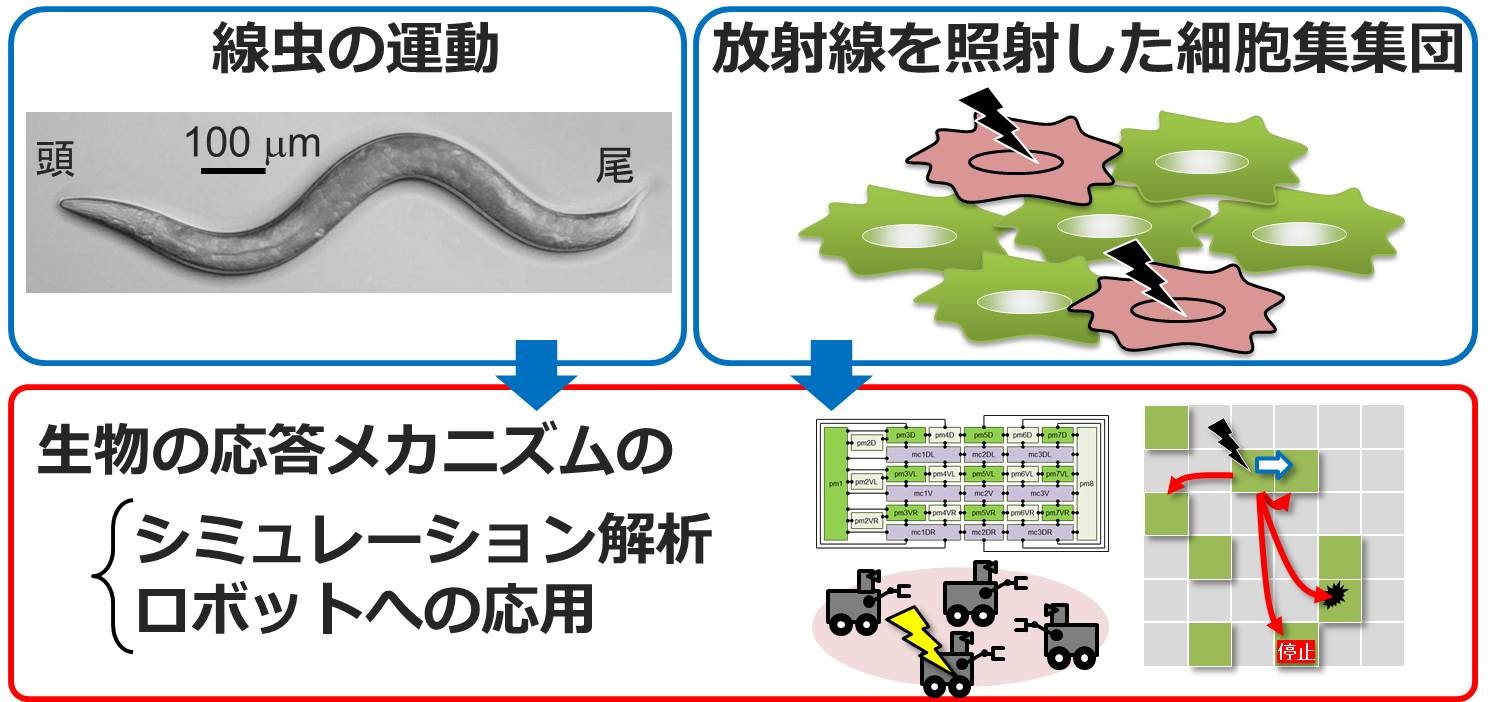
生物は、環境の変化や外部刺激等の外乱に対して、柔軟に適応する優れたメカニズムを持っています。この研究では、生物応答の生成・制御メカニズムを組織や細胞レベルで理解することと、メカニズムを応用して外乱に強いシステムを構築することを目的としています。具体的には、線虫の運動の数理モデリングとシミュレーション解析、放射線を使った細胞の応答メカニズムの解析、外乱・故障・環境の変化に強い群ロボットシステムの構築を進めています。
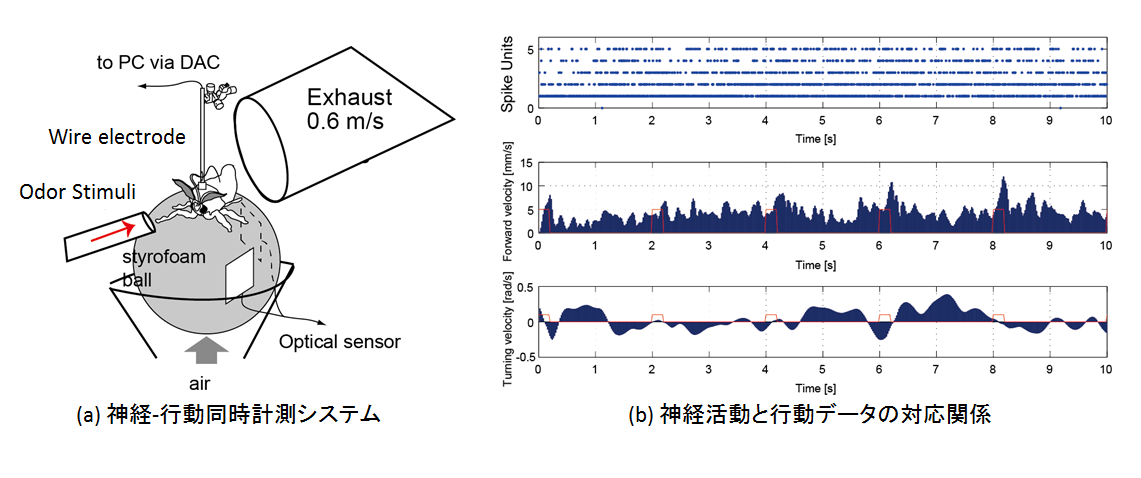
匂い源探索行動では状況に応じて適切な行動選択が必要となります。昆虫を題材に、脳内からの信号計測と行動計測を統合し、いかにして状況に応じた行動選択を実現しているのか、について解明を進めています。直進行動と回転行動に対応する脳活動神経信号ユニットを特定し、関連制御系の変化について調べています。

アメーバは単細胞(多核)生物で、神経系を持ちません。切っても死なない柔らかい体をどうやって動かして、餌を食べたり危険から逃れたりしているのでしょう?実は、アメーバの柔らかい体はその厚みが周期的に変化する「振動子」でできているのです。これを応用し、振動子の同期現象によって生じる位相進行波という「波」を制御することで、個々のロボットに依存せず、局所的な情報交換だけで大規模な集団を誘導することが可能になります。
東京工業大学 工学院 システム制御系システム制御コース 倉林研究室
〒152-8552 東京都目黒区大岡山2-12-1 南5号館
